Jízda autonomním vozidlem
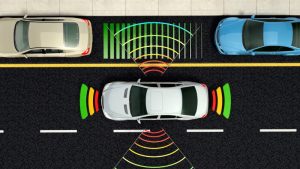
Jak vidí autonomní vozidlo silnici?
Jízda autonomním vozidlem
Jak vidí autonomní vozidlo silnici?
0 – bez automatizace, automatický systém pouze varuje, ale neovládá vůz
1 – asistence řidiče („hands on“), automaticky mohou probíhat složitější funkce (adaptivní tempomat, aktivní parkovací asistent), řidič musí být schopen kdykoli řídit
2 – částečná automatizace („hands off“), automat řídí, zrychluje i brzdí, řidič musí sledovat provoz a kontrolovat činnost systému
3 – podmíněná automatizace („eyes off“), v definovaném prostředí se řidič nemusí věnovat řízení, musí však být připraven převzít řízení v časovém limitu, který stanoví výrobce
4 – vysoká automatizace („mind off“). S výjimkou vysoce nebezpečného prostředí (nebezpečné počasí) řídí automat a řidič nezasahuje
5 – plná automatizace („řízení volitelné“). Automat řidí do libovolného legálního cíle, řidič jen zadá cíl
Rizika a nevýhody:
Problémem je jak nedostatečná pokročilost vývoje, tak také legislativa, protože v zatím na většině míst není vytvořen nutný rámec zákonů regulující užívání samořízených aut
Jsou vznášeny i etické otázky na algoritmus a jeho chování (preference) v situacích jako je například dopravní nehoda
Autonomní i neautonomní vozidlo však může být nebezpečné a zneužitelné, pokud dodávaný systém umožní vzdáleně ovládat automobil (např. proti krádeži)
V současnosti potřebuje mít stále podporu řidiče
Algoritmus ještě plně nenapodobuje lidské rozhodování řidič
Nehody (Google při prvním spuštění přiznal několik autonehod)
V současnosti není připraven do běžného provozu ani legislativa
Vysoká cena pro veřejnost (např. rodiny, jednotlivec…)

Tohle je seznam senzorů, které auto používá k pohybu po silnicích
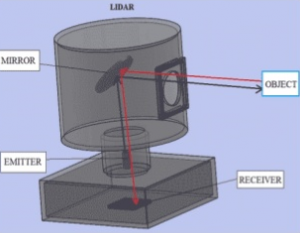
LIDAR (Light Detection And Ranging)
Je metoda dálkového měření vzdálenosti na základě výpočtu doby šíření pulsu laserového paprsku odraženého od snímaného objektu
Dokáže skenovat vzdálenost až 60 metrů
GPS (Global Positioning System)
Je vojenský globální družicový polohový systém s jehož pomocí je možno určit geografickou polohu přijímače nacházejícího se kdekoliv na Zemi nebo nad Zemí

Radar (Radio Detection and Ranging)
Je zařízení určené k vyhledání cílů, určení jejich polohy, případně i jejich identifikaci pomocí elektromagnetického záření
Videokamera (Optics)
Je elektronické zařízení, sloužící k zachycení pohyblivého obrazu a synchronního zvuku

Procesory (Processors)
Pro získání údajů shromážděných nástroji vozidla je zapotřebí sedm dvoujádrových procesorů s frekvencí 2,13 GHz a 2 GB paměti RAMNěkteré automobily používají až 17 procesorů k vyčlenění výpočetní zátěže